
Overview
 This module introduces the software and engineering concepts for development of custom hardware applications exemplified through the use case of scaled autonomous vehicles. Throughout the course, we will cumulatively develop the skills required to achieve safety-minded autonomous driving algorithms. By learning how to design systems with the Robot Operating System (ROS), students will use LIDAR data to interact with the world around a simulated autonomous vehicle. By the end of the course, the students will implement multiple autonomous driving methods, namely “Wall Following” and “Follow the Gap”. Students completing this course will be positioned to implement autonomous algorithm development on their own projects or may elect to further develop on the car that will be competing in the Formula 1/10th competition as part of the team. It is highly recommended that incoming students are familiar with an object-oriented programming language, as we use Python extensively in this course.
This module introduces the software and engineering concepts for development of custom hardware applications exemplified through the use case of scaled autonomous vehicles. Throughout the course, we will cumulatively develop the skills required to achieve safety-minded autonomous driving algorithms. By learning how to design systems with the Robot Operating System (ROS), students will use LIDAR data to interact with the world around a simulated autonomous vehicle. By the end of the course, the students will implement multiple autonomous driving methods, namely “Wall Following” and “Follow the Gap”. Students completing this course will be positioned to implement autonomous algorithm development on their own projects or may elect to further develop on the car that will be competing in the Formula 1/10th competition as part of the team. It is highly recommended that incoming students are familiar with an object-oriented programming language, as we use Python extensively in this course.
Learning Outcomes:
By the end of this module, students will have demonstrated familiarity and ability in: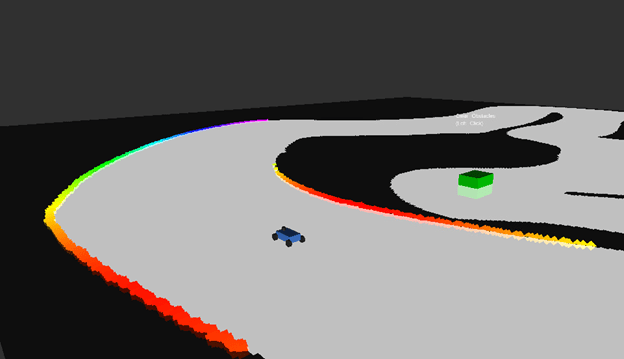
- Good laboratory Environment, Health, and Safety practices
- Developing software in a Linux (Ubuntu) environment
- Designing multi-sensor systems with the ROS framework
- Using LIDAR as a means of vehicle perception
- Using PID to achieve an autonomous wall following algorithm
- Implementing a reactive control method (follow the gap) for better autonomous control
- Designing autonomous systems with Planning, Perception, and Control as major components
Labs:
The lab assignments are the means of applying the concepts learned in lecture. Throughout the course, students will incrementally develop the software of an autonomous car to use in a simulated driving environment. Since the simulator emulates an actual car, the software developed on the simulator can be used directly on the car. With the skills accrued in the course, students can join and contribute to the Formula 1/10th team, in which we research and apply different methods of autonomous driving to race around a track in minimal time.
- Lab 1: Understanding the ROS system and development environment
- Lab 2: Familiarizing with the F1/10th simulator and LIDAR data
- Lab 3: Introducing Automatic Emergency Braking for safer driving control
- Lab 4: Using PID to implement autonomous wall following algorithm
- Lab 5: Implementing the autonomous Follow the Gap algorithm
- Final Project: Open ended research project leading to speedup compared to Follow the Gap